Imagine that your purpose in life is to move men, women, and hard military assets around the world. You’ll ask pilots to fly aircraft large and small to faraway regions. You send in a team of quiet professionals into a dangerous enclave for a rescue, and you’re responsible for getting them out with the precious cargo.
This is the life of a SOCOM operator. And the operator needs tools to make all this easy, or at least manageable.
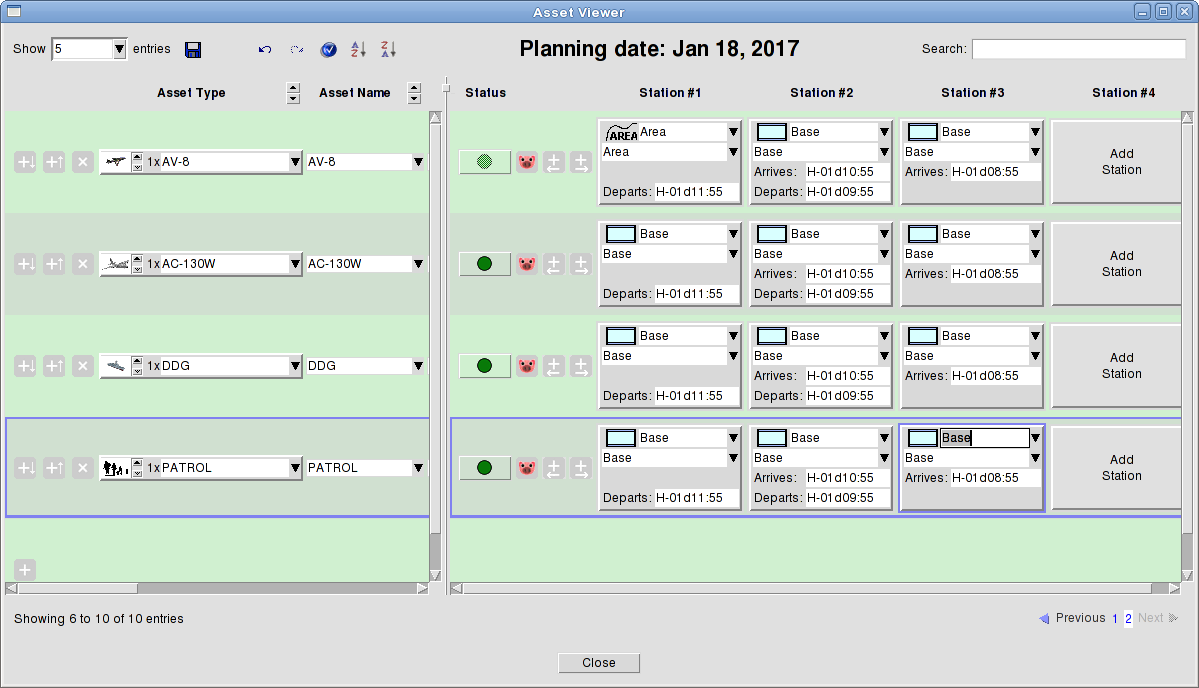
That’s where the SOFTools temporal planning system comes in. Born of an ingenious program called Active Templates at DARPA, and improved continuously through ever since its first fielding in 2002, SOFTools allows operators to plan, brief, and execute SOCOM missions.
I’ll hit a couple of highlights about the system:
Reliability and Accuracy
SOFTools has to be reliable, with no unexpected downtime, glitches, or data loss. And when the program calculates a value–like the time in Afghanistan, or the brightness of the moon–the operator needs to trust what it’s saying.
Intuitive
When the operator wants to create a route for an aircraft, it has to be easier than planning a personal trip to Seattle and back on Hipmunk. Notwithstanding the fact that the trip to Seattle doesn’t require mid-air refueling.
Plus, the system has to transition cleanly between the planning phase (where all the routes are built and the assets are synchronized) to the briefing phase (where The Boss gets to review the plan via a one-click Export to PowerPoint) to the execution phase (where each step of the plan is laid out).
Now, for a bit of development talk
SOFTools uses an underlying C and C++ graphics engine to do the heavy lifting. It avoids blocking like the plague. And it uses a uber-cool XML parser and interpreter to represent the planning data, creating a NetCentric environment so the data can be shared with other SOCOM systems.
The result? Pilots and operators can communicate clearly during execution. Fewer mistakes. Quicker battle tempo. People who are held captive get to go home to their families.